
中國靈巧手廠商如何用架構創(chuàng)新、規(guī)模降本與數(shù)據(jù)生態(tài)破局。
作者|王藝
編輯|王博
2025年第三季度財報會上,馬斯克宣布Optimus 3.0推遲到明年一季度,但更令業(yè)界震驚的是背后曝光的成本數(shù)據(jù)。
據(jù)公開信息,Optimus的靈巧手在訓練分揀快遞時,壽命只有6個星期,一年要換8~9次手——而特斯拉單只手的成本超過6000美元,約合4.2萬元人民幣。再加上其他易損部件,不算電費,一臺機器人一年光換零件就要花近10萬美元,約合71萬元人民幣。
這個數(shù)字讓人形機器人的商業(yè)化前景蒙上了一層陰影。馬斯克曾豪言Optimus可能是史上最重要的產(chǎn)品,還計劃2026年生產(chǎn)百萬臺,但現(xiàn)實是,Optimus連基本的耐用性問題都還沒解決。
Optimus的靈巧手是整個機器人最復雜的部件之一,集成了22個自由度、行星滾柱絲杠、腱繩傳動和齒輪系統(tǒng)。這種混合方案理論上能平衡靈活性與剛性,但高復雜度帶來了高故障率和高維護成本——這正是當前靈巧手行業(yè)面臨的普遍困境。
成本高、易損壞、工程化難度大,這三大痛點不僅困擾著特斯拉,也是全球靈巧手產(chǎn)業(yè)亟待突破的瓶頸。
靈巧手作為人形機器人與外界交互的重要媒介,是機器人功能性的直接體現(xiàn),其成本約占整個人形機器人BOM成本的10~25%。根據(jù)東吳證券測算,2025至2035 年,人形機器人新增需求將從2.5萬臺躍升至1165萬臺,而靈巧手市場空間也有望從36億元增長至2330億元,十年復合增速高達52.4%。
那么,在技術路線尚未收斂、商業(yè)化窗口期臨近的當下,靈巧手行業(yè)正在發(fā)生什么變化?誰在解決這些核心問題?
帶著這些疑問,我們走進了IROS 2025(The 2025 IEEE/RSJ International Conference on Intelligent Robots and Systems,2025年智能機器人與系統(tǒng)國際會議)。這場被稱為機器人界“奧斯卡”的全球頂級學術盛會,為我們提供了觀察靈巧手產(chǎn)業(yè)的最佳窗口。
1.技術路線“三國殺”——直驅、繩驅、混合方案的激烈競爭
走進IROS 2025展館,最直觀的感受是:靈巧手已經(jīng)成為絕對主角。
與以往機器人展會上常規(guī)的跳舞、分揀、按摩等整機展示不同,從上游的零部件廠商到下游的整機廠商,幾乎過半展臺都展示了自己的靈巧手產(chǎn)品。無論是Shadow Robot的新一代三指靈巧手,還是舞肌帶著手套的靈巧手,抑或是強腦科技比人手還小巧秀氣的手,都吸引了大量觀眾前來詢價和觀察技術細節(jié)。

IROS現(xiàn)場參觀靈巧手的觀眾,圖源:「甲子光年」拍攝
目前,國產(chǎn)靈巧手正在經(jīng)歷從“功能實現(xiàn)”邁向“體驗優(yōu)化”的躍遷期。能不能動得靈活的同時做到能耗最小,成為靈巧手優(yōu)化的兩大關鍵方向,而影響這兩項指標的核心在于傳動方案。
靈巧手是模擬人手制造的,人手在約400~800cm3的有限空間里,容納了27塊獨立的骨骼,29個關節(jié),約123條韌帶及34條肌肉。要讓一只機械手像人手一樣靈活抓握,需要一套精密的“筋骨系統(tǒng)”,來傳遞大腦(電機)發(fā)出的指令。
目前,主流的靈巧手傳動方案有三種:連桿、齒輪和腱繩。
連桿傳動主要是用多個連桿串并聯(lián)混合的形式將動力源的運動傳遞到末端執(zhí)行器,原理類似“折紙”,通過軸(鉸點)連接,基于幾何關系控制實現(xiàn)關節(jié)運動。它的優(yōu)點是簡單粗暴,非常“皮實”——連桿的剛性極好,能承受巨大的負載,而且制造成本低;缺點則是“肌肉”太硬——連桿傳動就像給機器人裝上了一套笨重的外骨骼,自重大、靈活性差,而且非常怕“硬碰硬”的沖擊。

連桿傳動工作原理,圖源:東吳證券
齒輪傳動則主要靠驅動器通過齒輪或蝸輪蝸桿將旋轉變成直線運動,拉動驅動器和手指之間的彈簧來驅動手指產(chǎn)生動作,手指部分采用金屬連接,各個手指動作相互獨立。其優(yōu)點是傳動精準、反應迅速,齒輪可以和電機緊密配合,實現(xiàn)每個關節(jié)的獨立精準控制,甚至能做到“力反饋”,從而更好地抵抗沖擊;而劣勢是結構冗雜,笨重——精密的齒輪結構往往意味著重量的增加。
例如,星動紀元采用純齒輪方案的靈巧手,重量就達到了1.1公斤,這對于追求輕量化的人形機器人來說是個不小的負擔。

齒輪傳動(蝸輪蝸桿)示意圖,圖源:鼎圖智能科技
而腱繩傳動則模仿人類手指的“肌腱&骨骼”結構,用腱繩代替肌腱,通過“拉繩子”帶動關節(jié)運動。這種設計的最大好處是輕盈、柔韌、最像“人手”,可以將笨重的電機和驅動器移到手臂或手腕處,極大地減輕了手部的重量和體積,讓手指活動更自由;缺點則是“嬌貴”且昂貴,腱繩容易磨損,更換和維護成本高昂。同時,由于繩索具有彈性,其控制精度相對較低,并且目前高性能腱繩的生產(chǎn)成本也居高不下。

腱繩傳動工作原理 ,圖源:中信建投證券
此外,還有一種傳動方式是人工肌肉傳動。這種傳動方式主要依靠液品聚合物材料/記憶合金材料,原理與人類肌肉收縮和拉長類似。優(yōu)點是可以減少驅動器的體積,缺點是是控制難度大、散熱慢、技術極不成熟,尚處于實驗室階段,因此本文不做詳細介紹。
這其中,連桿和齒輪由于是剛性材質,更多用于直驅的技術路線;而柔性材質的腱繩則更多用于繩驅的技術路線。此外,還有一種直驅+繩驅混合的技術路線,通過“連桿+腱繩”或者“齒輪+腱繩”的方式,構成多模態(tài)的傳動協(xié)同。

靈巧手直驅、繩驅、混合技術路線對比,制圖:甲子光年
當前,國內(nèi)廠商普遍采用連桿傳動方案,該方案的優(yōu)勢在于可以雙向控制關節(jié),且結構堅固、易于制造和維護。在此次的IROS的展會上,Sharpa、WUJI等廠商都帶來了他們直驅方案的靈巧手。
來自新加坡的機器人公司Sharpa展示了“荷官在線發(fā)牌”。撲克牌非常輕薄和光滑,人用手分開兩張撲克牌也不是一個輕松的事情。Sharpa的靈巧手SharpaWave可以細膩地從牌堆中捻出一張,動作絲滑,抽牌遞牌的過程中,手部也沒有細碎的抖動,動作完成度很高。
Sharpa市場總監(jiān)Derek對「甲子光年」表示,他們的靈巧手具有22個主動自由度,每個關節(jié)都可獨立控制,除了手指彎折和外展外還在小指下方加了一個手掌內(nèi)收的自由度,能提供更高的靈活性;同時,Sharpa在靈巧手的每個指尖都配備了動態(tài)觸覺陣列(DTA),能夠實時感知物體的運動。
“如果沒有觸覺模塊,靈巧手拿一瓶可樂的時候可能會把它擠爆,我們費了很大力氣把觸覺的模塊集成到一個很小的一個指尖里面去,也得到了很多客戶的認可。之前伯克利發(fā)布的做漢堡的Demo里,用的也是我們的靈巧手。”Derek說。
Sharpa的靈巧手還能完成從拿起拍立得拍照,并把照片遞給用戶的全流程。不僅手指能撥動轉盤,捏輕薄的照片也不在話下。
此外,舞肌(WUJI)也帶來連桿驅動的靈巧手WUJI Hand。得益于股東動力新科深厚的電機研發(fā)積累,WUJI Hand做得更小,尺寸與人手相當;手指更修長,還做了指甲的設計。這只手的整體重量只有600g,擁有20個全主動自由度,每根手指有四個獨立關節(jié)。這種程度的關節(jié)活動旨在模擬人手的復雜性和運動范圍,使其能夠完成復雜的抓握和操作任務。
舞肌的工作人員龐澤鈺對「甲子光年」表示,WUJI Hand采用了全直驅的方案,為了縮小手的體積,他們直接把小電機放進了手指里面,每個手指里有四個電機,除拇指外四個手指也都可以做側擺。此外,這只手的負載能達到10kg,最大指尖壓力能達到15N,數(shù)據(jù)反饋頻率最高可達1000Hz,延遲很小。而這款靈巧手的售價也十分親民,只要5萬元人民幣。
此外,這次舞肌還拿出了一個觸覺方案——壓阻方案的觸覺手套。在宣傳片中,可以看到這個方案的靈活性——轉筆、按打火機、筷子夾球、使用剪刀、按遙控器等需要復雜掌內(nèi)操作的動作都不在話下。
因時機器人則選擇了直線驅動+連桿/齒輪的技術路線。作為靈巧手的領軍企業(yè),在2025上半年,因時機器人靈巧手銷量就已經(jīng)超4000臺。本次IROS上,除F1、E2、DFX及BFX系列等靈巧手精彩展示之外,因時還展示了他們最新款的“高自由度仿人五指靈巧手”。
2025年全新發(fā)布的RH56F1系列靈巧手,搭載了“接近覺”感知技術,能夠在未接觸物體前實現(xiàn)目標物體的位置感知。

RH56F1靈巧手感知運動 ,圖源:因時機器人
RH56DFX系列靈巧手則展示了強大負載能力,穩(wěn)穩(wěn)抓握并懸停10公斤啞鈴,完美詮釋“既能做精細活,又能干力氣活”的綜合實力。

RH56DFX靈巧手抓啞鈴,圖源:因時機器人
因時機器CMO房海南告訴「甲子光年」:“現(xiàn)在的靈巧手大部分還是微型伺服電缸+連桿方案,在成本、可靠性上優(yōu)勢更大。而且,因時的微型伺服電缸年銷量幾萬臺,在產(chǎn)品性能、一致性和量產(chǎn)能力上毋庸置疑是更強的。”
除靈巧手外,因時機器人還展示了LAF系列與LA系列微型伺服電缸等產(chǎn)品。
然而,直驅固有的剛性與厚度也帶來了結構冗余、靈活性和抗沖擊能力不足的缺點。在現(xiàn)有的電機直驅、連桿、腱繩及人工肌肉四種主流傳動方案中,腱繩傳動被廣泛認為是理論上與實踐中最有潛力克服性能限制的方案。特別是自特斯拉發(fā)布其采用“行星齒輪箱+行星滾柱絲杠+腱繩”三級傳動方案的第三代Optimus靈巧手后,腱繩傳動方案更是吸引了全行業(yè)的廣泛關注。
在此次IROS 2025上,我們也看到了許多采用繩驅方案的靈巧手。
以靈巧智能為例。靈巧智能的最新款Dexhand21 Pro靈巧手就針對其上一代DexHand021做了很多改良。同樣是雙繩驅正反向驅動系統(tǒng),Dexhand21 Pro的控制精度更加精準;手的背后有兩根推桿,讓手腕的活動更加自然。據(jù)介紹,該靈巧手擁有22個自由度仿生架構,配合雙繩驅正反向驅動技術,能精準模擬人類手指操作。兩個主動腕關節(jié)不僅擴展30%工作空間,更能復現(xiàn)“翻腕倒水”等復雜動作,動態(tài)調(diào)姿系統(tǒng)可實時補償手指位姿,適應非結構化環(huán)境。
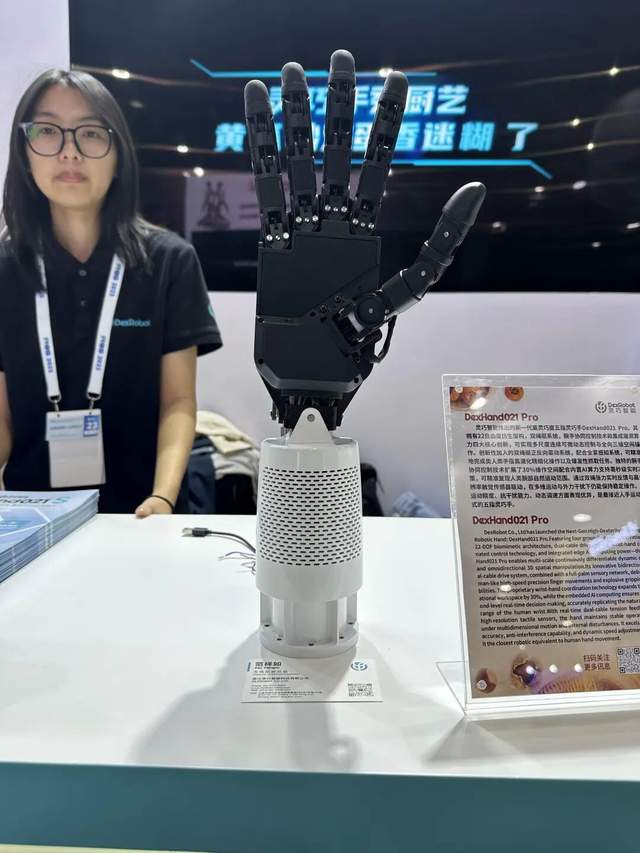
靈巧智能Dexhand21 Pro,圖源:「甲子光年」拍攝
傳統(tǒng)繩驅方案通常采用單腱繩拉動,但在IROS現(xiàn)場,多家企業(yè)展示了雙腱繩或多腱繩方案。雙腱繩通過拮抗肌原理(一根繩負責拉、一根繩負責推),可以更好地控制手指的力度和位置,提高精度和響應速度。
星際光年在IROS前夕發(fā)布的Pantheon 22靈巧手,采用了對標特斯拉的“臂手一體”架構。這種設計將驅動器集成在手臂內(nèi)部,通過優(yōu)化的腱繩布局,在保持輕量化的同時提升了傳動效率。
星際光年創(chuàng)始人位德浩在接受「甲子光年」采訪時表示:“性能上,Pantheon 22靈巧手擁有22個自由度,包括15個主動自由度、5個被動自由度和2個腕部自由度,傳動路徑縮短,剛性提升,單手抓取力高達30kg,重復定位精度達0.17mm;成本上,一體化設計減少了連接器和適配結構,降低了整體物料和裝配成本;部署上,簡化了機器人本體的集成難度,客戶無需再為解決‘臂-手’兼容性問題投入額外研發(fā)。”
星際光年近日還完成了Pre-A輪融資,資金將主要用于產(chǎn)品工程化和供應鏈建設。
除了靈巧智能和星際光年,國內(nèi)企業(yè)中,源升智能、伯牙智能、曦諾未來等都在積極探索繩驅方案的商業(yè)化路徑。而國外,也有像Shadow Robot這樣的前來參展。
Shadow Robot作為繩驅方案的鼻祖級企業(yè),其Dexterous Hand系列產(chǎn)品已有20多年歷史,是學術界和研究機構的標準配置。但Shadow的產(chǎn)品價格昂貴(單手數(shù)萬美元),主要面向科研市場。
此次IROS,Shadow Robot帶來了與Google DeepMind合作開發(fā)的主要用于科學研究的新款靈巧手DEX-EE,它是一個三指夾爪的形態(tài),以穩(wěn)健可靠的封裝提供動態(tài)可控的運動,確保實驗長時間運行,避免因硬件故障而中斷。
據(jù)介紹,DEX-EE的高速傳感器網(wǎng)絡可提供豐富的傳感器數(shù)據(jù),包括位置、力和慣性測量,以及每個手指數(shù)百個觸覺傳感通道。Shadow突破性的指尖傳感器每個都擁有數(shù)百個觸覺單元,并具有極大的動態(tài)范圍。
Shadow市場總監(jiān)對「甲子光年」表示,Shadow Robot通過直接在關節(jié)上放置位置感應器、在肌腱末端測量肌腱張力的方法進行保證繩子不會變形和松弛,“因為電機可以控制間隙,我們還在測量實際關節(jié)處的位置,因此從長遠來繩子斷裂的問題是不存在的;我們的所有零件也都是可替換的,即使一只手指壞了,用戶也可以直接卸掉整個手指,再安上另一個手指。”
直驅不抗沖擊、柔性交互能力有限,繩驅則易磨損、成本高、傳動效率低。因此,在繩驅之外,一些廠商也探索出了直驅和繩驅“二者結合”的混合路線。
以智元機器人為例,他們的靈巧手采用了綜合絲桿、連桿、渦輪蝸桿、腱繩傳動等多種技術的混合驅動方案,會根據(jù)關節(jié)功能選擇最優(yōu)方案;

圖源:InnoMatch
智元機器人申請的“靈巧手和機器人”專利內(nèi)容(CN202510310348.9)針對傳統(tǒng)靈巧手在剛度和擬人性之間難以兼顧的問題,提出了一種新型靈巧手及機器人結構
特斯拉的第三代靈巧手也是連桿+腱繩混合方案的典型代表。Optimus Gen3的靈巧手采用了“行星齒輪箱+絲杠+腱繩”結構,將蝸輪蝸桿方案替換為行星滾珠絲杠,絲杠能提供精準的線性驅動,具備最高的承載力,適用于工廠等場景。減速器方面,采取行星減速器(齒輪箱)提高傳動精度、增強扭矩輸出能力。

特斯拉第三代靈巧手采用混合傳動方案,圖源:財信證券
2.商業(yè)化的“三座大山”:技術未收斂、成本高企、數(shù)據(jù)匱乏
從IROS展出的狀況來看,靈巧手行業(yè)的技術路線仍未收斂。導致這一問題的首要原因就是繩驅手好用,但難做。
靈心巧手創(chuàng)始人兼CTO周永告訴「甲子光年」,目前由于技術發(fā)展水平的不同,國內(nèi)的方案仍然以直驅+連桿為主,繩驅方案剛剛起步;而國外的繩驅靈巧手做了很多代,已經(jīng)發(fā)展得相當成熟了。
“再一個點就是,國內(nèi)喜歡等國外做出來再抄,比如抄特斯拉、抄Shadow Robot。如果國外沒有做,國內(nèi)的企業(yè)一般很難有自己的創(chuàng)新。”周永說,“繩驅方案在某些場景下有優(yōu)勢,但腱繩存在蠕變問題、材料成本更高、維護起來更復雜,讓其在工業(yè)場景的應用受到限制”。
除了在繩子的控制方面不夠成熟,國內(nèi)靈巧手企業(yè)面臨的第二個技術難題是自由度。
周永告訴我們,在實際操作過程中,靈巧手前三根手指(大拇指、食指、中指)的自由度是最重要的,后兩根手指(無名指和小拇指)的自由度盡管也很重要,但主要用于姿態(tài)調(diào)整,具體抓取、擺放、轉動物品等主要還是靠前三根手指。
這也與當前的事實相符合——大多數(shù)靈巧手仍然停留在實驗室的研究用具或者展臺展品階段,真正在工業(yè)或商業(yè)服務場景中承擔作業(yè)任務的靈巧手寥寥無幾。在現(xiàn)實產(chǎn)業(yè)應用中,結構簡單、成本低廉、低自由度、控制穩(wěn)定的夾爪依然是市場的主流選擇。
現(xiàn)在很多靈巧手不能商用的原因是自由度不高,導致可控性和靈活性不足。人手有21個自由度(加上手臂為27個),在IROS上,各家靈巧手廠商展出的自由度多在12~20個之間,能做21個自由度以上靈巧手的廠家數(shù)量不多。
導致自由度不足的第一個原因是機械結構。現(xiàn)在市面上采用直驅方案靈巧手多采用“電機+連桿/齒輪”的設計方案,很多都是單電機驅動多關節(jié),導致自由度受限。加上非模塊化的傳動鏈會放大誤差,影響高自由度下的精度控制;非模塊化系統(tǒng)也難以單獨更換故障部件,限制了自由度的擴展。
導致自由度不足的第二個原因是算法和數(shù)據(jù)。自由度越高,控制算法復雜度呈指數(shù)級增長;同時,多關節(jié)協(xié)同需實時處理海量傳感器數(shù)據(jù)(如觸覺、力矩反饋),而現(xiàn)有算法在動態(tài)環(huán)境中的泛化能力不足,依賴大量數(shù)據(jù)訓練,導致自主操作能力有限。
由于現(xiàn)在手部操作模型(小腦模型)的訓練效果十分有限,靈巧手版本的VLA模型尚未出現(xiàn),靈巧手的大部分動作仍然靠手寫規(guī)則或遙操作實現(xiàn)。而靈心巧手在IROS晚宴上展示的彈鋼琴LinkerBot的靈巧手,就是采取操作模型訓練+真機強化學習訓練出來的。
據(jù)相關報道,有技術人員透露,要判斷判斷是否為模型驅動,看靈巧手抖不抖就行,因為模型訓練是通過大量數(shù)據(jù)實現(xiàn)的,素材員每次采集數(shù)據(jù)時,手臂位置、移動速度都不可能是一樣的,模型最終會取一個平均值,訓練出來的動作多少會有一定抖動。
在IROS的現(xiàn)場,我們也確實看到部分靈巧手在運動時存在抖動現(xiàn)象。
導致自由度不足的第三個原因是材料。碳纖維等復合材料雖輕,但剛性不足(彈性模量僅為鋁合金的1/3),無法支撐高負載下的多自由度運動。例如,DexHand021 Pro的鈦合金骨架成本就占占到了整機的40%。
技術路線未收斂、自由度難題難攻克,這些技術問題只是造成靈巧手商業(yè)化落地難現(xiàn)象的第一個原因。除此之外制造成本高企、供應鏈瓶頸、場景碎片化等問題也拉慢了靈巧手商業(yè)化落地進程:
成本方面,靈巧手的核心部件(如空心杯電機、行星滾柱絲杠)等多依賴進口或定制化生產(chǎn),尤其是空心杯電機,一只空心杯電機的價格約為一兩千,按照一般靈巧手配備 6~12 個的數(shù)量估算,僅電機一項零部件成本便動輒幾萬。
供應鏈方面,靈巧手涉及數(shù)百個精密零部件(如微型減速箱、定制電路板),加工依賴CNC等高成本工藝,量產(chǎn)良率低。國內(nèi)供應鏈雖在電機、傳感器領域有所突破,但高端部件(如高精度編碼器)仍受制于海外。
場景方面,工業(yè)場景下的現(xiàn)有靈巧手在重復定位精度(±0.2mm vs 工業(yè)夾爪±0.02mm)、負載能力上仍遜于傳統(tǒng)機械臂;家庭服務、醫(yī)療康復等場景則對于安全性、易用性的要求極高。但更重要的還是數(shù)據(jù)場景匱乏與泛化難的問題——靈巧手需海量任務數(shù)據(jù)(如不同材質、形狀物體的抓取)訓練AI模型,但現(xiàn)實場景數(shù)據(jù)采集成本高,且跨場景泛化能力不足。
例如,咖啡拉花動作需針對杯型、液體黏度調(diào)整策略,即使是一個簡單的杯子抓取動作,杯子的不同形狀、不同方向、不同位置、不同環(huán)境和光照等等更都需要不斷調(diào)整并收集數(shù)據(jù)。換句話說,物理世界中所有可能出現(xiàn)的情況都要考慮在內(nèi),而現(xiàn)有數(shù)據(jù)集覆蓋極為有限;
觸覺數(shù)據(jù)則更為匱乏,在靈巧手爆發(fā)之前,這一領域基本一片空白。盡管多數(shù)靈巧手廠商都在靈巧手上加裝了力覺、觸覺傳感器,但采集并將觸覺模態(tài)數(shù)據(jù)真正投入訓練是另一回事。據(jù)公開報道,有多位行業(yè)專家表示,短期內(nèi)觸覺模態(tài)的意義不會很大,其真正爆發(fā)一定是具身智能在工業(yè)、商業(yè)應用徹底成熟,并開始進入交互要求更為精細的家庭場景之后。但從長遠計,觸覺一定是大勢所趨。
3.破局者的“三把鑰匙”:架構創(chuàng)新、規(guī)模降本、數(shù)據(jù)生態(tài)
技術路線的多元化、商業(yè)化落地的諸多難題,最終都要落到一個核心問題上:誰能真正解決技術卡點、成本高企、數(shù)據(jù)采集難三大痛點,率先實現(xiàn)商業(yè)化突圍?
在IROS 2025現(xiàn)場,我們看到了一些企業(yè)正在給出自己的答案。
關于技術路線會長期并存還是會走向收斂,一直以來都是行業(yè)內(nèi)爭議最大的話題之一。
靈心巧手創(chuàng)始人兼CTO周永認為,連桿、齒輪、繩驅三種傳動方案會長期并存。
“不同客戶有不同需求,短期之內(nèi)不會收斂。我們希望最早生產(chǎn)出一百萬只靈巧手,所以堅持三個路線同時研發(fā),給用戶選擇的權利。”周永告訴「甲子光年」,他們團隊最早并行探索了十來種傳動方案,甚至嘗試過氣動,累計研發(fā)四五十款靈巧手,最后收斂為當下三大路線,“我們認為三種路線會像行星、諧波、RV減速器一樣長期共存。”
周永還表示,靈心巧手計劃一年內(nèi)推進實現(xiàn)由靈巧手“自我生產(chǎn)”的機械臂和靈巧手,三年內(nèi)拓展至手機、電腦等AI硬件生產(chǎn),十年內(nèi)實現(xiàn)組裝外太空飛船。
但星際光年創(chuàng)始人位德浩持有不同觀點。他認為從長遠看,繩驅會成為主流方案,“繩驅在靈活性、輕量化、仿生性上的優(yōu)勢是不可替代的,現(xiàn)在的問題只是工程化成熟度的問題。”
位德浩的判斷并非毫無依據(jù)。特斯拉第三代Optimus靈巧手就采用了以繩驅為核心的混合方案,盡管目前仍面臨壽命短、成本高的問題,但這恰恰說明了繩驅方案的潛力和挑戰(zhàn)所在。
而關于“繩驅如何防止磨損和蠕變”這一難題,各家廠商也都拿出了自己的解決方案。
周永團隊五年前就開始攻克這一難題,他們的解決方案是:通過巧妙的結構設計降低繩索摩擦,同時選擇高質量、耐用的腱繩。“我們與國產(chǎn)供應商合作開發(fā)高性能腱繩,目前已實現(xiàn)全部國產(chǎn)化。”
他還以達芬奇手術機器人為例證明該方案的可行性:“達芬奇手術機器人也是用繩驅做精密操作,證明這個方案具備規(guī)模應用能力。”
星際光年則從材料、結構、算法三個維度做了系統(tǒng)創(chuàng)新:材料上,自研高強度復合腱線,抗拉伸性能提升3倍,疲勞壽命達50~80萬次;結構上,采用大扭力仿生直驅結構,優(yōu)化繩索傳動及摩擦路徑;算法上,開發(fā)自動張緊技術與智能補償算法,實時維持繩索張力恒定,徹底解決繩索蠕變帶來的精度和負載能力下降問題。
“目前Pantheon Hand 22在連續(xù)數(shù)十萬次工作中精度衰減控制在±1°以內(nèi),壽命測試后仍保持99%的精度。”位德浩說。
而對于堅守直驅路線的企業(yè)來說,模塊化設計成為了他們的核心突破點。
星際光年不僅做繩驅,也在電機直驅方案上進行了創(chuàng)新。位德浩告訴「甲子光年」,他們是國內(nèi)首家實現(xiàn)靈巧手模塊化的企業(yè),可以做到每個關節(jié)的快拆快換和自由組合。
“我們用的是自研的靈巧手專用微型關節(jié)模組,包含了驅動、編碼器、空心杯電機和微型渦輪蝸桿,是一體化的模組,可以實現(xiàn)即插即用。”位德浩解釋說,“客戶今天想要三根手指,我們只用裝三根就可以了。他甚至可以把我們的五指手拆了,用里面的模組再搭建一個三指手。”
這種模塊化思想的靈感來自樂高和機械臂行業(yè)。“機械臂不會自己做全部零件,而是買模組來搭建。小時候我就喜歡玩樂高,長大后做靈巧手,我就想,能不能用同樣的方式做靈巧手?”
因時機器人則在直驅路線上走得更扎實。因時認為,直線驅動+連桿或齒輪的方案特別適合當前人形機器人的主要應用場景(基礎抓握與搬運)。“繩驅和混合方案雖然在自由度上略優(yōu),但在實際場景中難以實現(xiàn)精細操作,反而在成本和可靠性上不如直驅+齒輪。”房海南說。
如果說技術路線的選擇決定了靈巧手的性能上限,那么成本控制能力則決定了商業(yè)化的下限。
目前主流靈巧手單價在2~5萬元,甚至更高。例如Sharpa擁有22個自由度的SharpaWave售價高達5萬美元(約35萬人民幣),這樣的價格顯然難以支撐人形機器人的大規(guī)模商業(yè)化。
然而最近,事情有了新變化。靈心巧手發(fā)布了Linker Hand O6,這款產(chǎn)品以370克的自重創(chuàng)下了全球最輕量產(chǎn)靈巧手紀錄,同時實現(xiàn)了50kg的負載能力,而這款手的售價僅為6666元。

靈心巧手Linker Hand O6 圖源:靈心巧手
星際光年也提出了“萬元級靈巧手”的目標。他們的直驅靈巧手定價已降至1.299萬元,而最終目標是“定價萬元以內(nèi)”。
位德浩向「甲子光年」解釋了實現(xiàn)這一目標的底層邏輯:架構性創(chuàng)新+全鏈條控制。
“我們重新定義了靈巧手的機械結構,采用全繩驅集成方案,通過模塊復用、繩路簡化;同時采用全鏈條自研,掌握核心部件定價權,且目前核心材料與傳動方案全部國產(chǎn)化,并設計了適用于大規(guī)模生產(chǎn)的工藝鏈。”
位德浩強調(diào):“核心杠桿不在‘壓價’,而在技術普惠——我們希望靈巧手不再是科研機構的‘奢侈裝備’,而成為每個機器人開發(fā)者都能負擔得起的標準部件。”
具體來說,成本降低的路徑包括以下幾條:
首先是提升出貨量攤薄成本。“采購1只和采購100只價格一定不一樣,生產(chǎn)100只的成本和生產(chǎn)10000只的成本也不一樣。”因時機器人CMO房海南表示。靈心巧手創(chuàng)始人兼CEO周永也強調(diào)了規(guī)模的重要性——靈心巧手早期由團隊自籌資金建立供應鏈和工廠,2023年就實現(xiàn)了量產(chǎn),率先產(chǎn)出了數(shù)千臺高自由度靈巧手。周永預計明年自己公司的出貨量會達到5-10萬臺。
其次是核心零部件全棧自研。星際光年的直驅方案采用自研微型關節(jié)模組,包含驅動、編碼器、電機和減速器的一體化設計,避免了中間渠道加價。因時機器人則憑借微型伺服電缸的規(guī)模優(yōu)勢(年銷量幾萬臺)壓低了核心部件成本。
第三是標準件替代非標件。位德浩坦言,繩驅成本高的主要原因是“非標件多、個性化需求強”。而星際光年通過工藝標準化和模塊化設計,用標準件替代非標件,從而降低了加工和裝配成本。
第四是國產(chǎn)供應鏈深度整合。靈心巧手在國內(nèi)市場已實現(xiàn)95%以上零部件國產(chǎn)化,目標是100%國產(chǎn)。“我們現(xiàn)在的繩子都是國產(chǎn)的,性能不輸國外,但成本顯著降低。”周永說。
第五是自動化生產(chǎn)線。周永透露,他們的工廠采用機械臂進行自動化生產(chǎn),大幅提升了生產(chǎn)效率,降低了人工成本。
這些降本路徑的共同特點是:不靠壓榨供應商,而靠技術創(chuàng)新和規(guī)模效應。正如位德浩所說,核心不在于“壓價”,而在于通過“技術普惠”讓更多人用得起。
值得注意的是,成本下降的前提是技術成熟度和良品率的提升。如果技術不成熟,即使價格低也難以商業(yè)化。這也是為什么周永在采訪中說自己“沒量產(chǎn)不見投資人”的原因——只有真正能量產(chǎn)、能穩(wěn)定交付的產(chǎn)品,才有資格談成本。
如果說技術和成本是靈巧手商業(yè)化的“硬實力”,那么數(shù)據(jù)則是具身智能時代的“軟實力”。
當整個行業(yè)都在為優(yōu)質數(shù)據(jù)發(fā)愁時,一個被忽略的事實也漸漸浮出水面:靈巧手廠商們,其實是離高質量操作數(shù)據(jù)最近的玩家。
作為靈巧手的設計與生產(chǎn)者,它們在研發(fā)、測試、調(diào)試過程中,會接觸到大量真實的操作場景。無論是在實驗室里測試捏薯片、擰瓶蓋,還是與客戶合作時在工廠里測試零件裝配,抑或在服務場景中測試遞取物品,在這些過程中,靈巧手的傳感器會實時記錄下手指的位置、力度、速度,以及與物體交互的細節(jié)。
這些數(shù)據(jù),都是具身智能行業(yè)急需的優(yōu)質教材。
更重要的是,優(yōu)質的靈巧手數(shù)據(jù)擁有對力的控制。這種細節(jié),是本體廠商們生成數(shù)據(jù)時難以點對點捕捉的,但靈巧手廠商們對這種力控數(shù)據(jù)無疑有著主場優(yōu)勢。
可以說,每一只靈巧手都是一個移動的數(shù)據(jù)采集器,而靈巧手廠商們手里握著一座未被開采的“數(shù)據(jù)金礦”。
而在眾多靈巧手玩家里,靈巧智能率先亮出了第一桶金。2025年9月底,靈巧智能正式發(fā)布并開源了大規(guī)模人手操作動作數(shù)據(jù)集DexCanvas。這一動作,跳出了硬件供應商的單一敘事,使其升維成了行業(yè)數(shù)據(jù)基礎設施的構建者。
DexCanvas的價值體現(xiàn)在四個維度:
1.規(guī)模與精度:融合了超過1000小時的真實人手操作多模態(tài)數(shù)據(jù),覆蓋動作、視覺、力覺以及由此衍生出的超過10萬小時的高保真物理仿真數(shù)據(jù),數(shù)據(jù)精度覆蓋亞毫米級軌跡。
2.物理真實性:通過一套獨創(chuàng)的數(shù)據(jù)采集與處理流程,保障了手與物體交互過程中的幾何與力學特性符合真實物理規(guī)律,有效縮小了仿真與現(xiàn)實的差距。這是行業(yè)首個系統(tǒng)性包含物理真實力覺信息的大規(guī)模人手操作數(shù)據(jù)集。
3.Real2Sim2Real閉環(huán):DexCanvas通過將真實世界采集的高質量數(shù)據(jù)注入并優(yōu)化仿真環(huán)境,訓練出更強大的控制模型,再將這些模型高效地部署到真實的靈巧手上,形成了一個不斷自我增強的、數(shù)據(jù)驅動的技術閉環(huán)。
4.全面開源:通過Hugging Face等主流AI社區(qū)平臺,靈巧智能與全球學術界、產(chǎn)業(yè)界共享這一數(shù)據(jù)集。這不僅降低了靈巧操作研究的門檻,更旨在構建一個圍繞高質量數(shù)據(jù)的技術生態(tài)。
DexCanvas:重新定義靈巧操作數(shù)據(jù)的“物理完備性” ,圖源:靈巧智能
靈巧智能技術研發(fā)工程師章俐珺告訴「甲子光年」,在指尖觸覺方面,他們針對不同用戶設計了不同的觸覺方案:“針對大型科研機構,我們采用了壓阻式的觸覺方案,適用于微電子組裝、生物力學研究等需要高精度觸覺反饋的場景;而針對普通企業(yè)用戶,我們則將電容式觸覺傳感器置于靈巧手的指尖,可以滿足如工業(yè)分揀、農(nóng)業(yè)采摘等日常場景的需求。”
在靈巧智能之外,帕西尼則走了一條更重的數(shù)據(jù)工廠路線。
2025年6月,全球規(guī)模最大的帕西尼具身智能超級數(shù)據(jù)工廠在天津啟用,占地近12000平方米,擁有15+N核心場景矩陣,可年產(chǎn)近2億條高維訓練數(shù)據(jù)。
帕西尼成立于2021年,擁有“傳感器-靈巧手-人形機器人”完整的多維觸覺產(chǎn)品矩陣,并構建起從硬件封裝、數(shù)據(jù)采集、算法集成到首個VTLA(視覺-觸覺-語言-動作)具身智能大模型的完整生態(tài)。據(jù)媒體報道,不到兩個月時間,數(shù)據(jù)工廠已采集500多萬條數(shù)據(jù)。帕西尼希望把數(shù)據(jù)放出去,加速提升靈巧手和具身智能系統(tǒng)在各行業(yè)的落地。
從IROS 2025的現(xiàn)場回望,我們看到了一個正在快速演進的靈巧手產(chǎn)業(yè):
技術路線上,直驅、繩驅、混合方案各顯神通,雙腱繩和臂手一體化成為繩驅新趨勢,模塊化設計成為直驅新突破;
成本控制上,從5萬美元到萬元級的突破正在發(fā)生,架構創(chuàng)新、規(guī)模效應、國產(chǎn)化供應鏈成為降本三板斧;
數(shù)據(jù)生態(tài)上,從靈巧智能的DexCanvas開源數(shù)據(jù)集,到帕西尼的2億條數(shù)據(jù)工廠,靈巧手廠商正在從零部件供應商升維為數(shù)據(jù)基礎設施提供商。
特斯拉Optimus靈巧手一年換8~9次、單次成本4.2萬元的"噩夢",在中國靈巧手廠商這里,正在被技術創(chuàng)新、工程化能力和生態(tài)思維逐步化解。
無論是周永用五年時間攻克繩驅可靠性,建立起國產(chǎn)化供應鏈;還是位德浩用模塊化思想重新定義靈巧手,將價格降至萬元級;抑或是靈巧智能用開源數(shù)據(jù)集構建行業(yè)生態(tài)、帕西尼用數(shù)據(jù)工廠打通從傳感器到大模型的全鏈條……這些企業(yè)的努力,讓我們看到了一個清晰的信號:靈巧手的商業(yè)化拐點正在到來。
正如靈心巧手創(chuàng)始人兼CTO周永所說,“靈巧手將帶動具身智能機器人成全球最大行業(yè),市場規(guī)模將會是汽車領域的20倍以上中國憑借政策紅利、企業(yè)攻堅自研和產(chǎn)業(yè)鏈優(yōu)勢,未來將占據(jù)全球80%市場份額和50%的行業(yè)利潤。”
當靈巧手真正成為“標準部件”,人形機器人才能真正從實驗室走向工廠、走向家庭、走向千行百業(yè)。而在這場靈巧手商業(yè)化突圍的競速中,中國企業(yè)正在展現(xiàn)出獨特的優(yōu)勢:完善的供應鏈、強大的工程化能力、開放的生態(tài)思維,以及對規(guī)模化量產(chǎn)的深刻理解。
這或許正是中國在具身智能時代彎道超車的最佳機會。
(封面圖來源:「甲子光年」拍攝)

 作者:王藝
2025-11-07
作者:王藝
2025-11-07

 96047
96047 1956
1956 243
243 0
0
